| Dats多面动平衡软件 |
|
|
Dats多面动平衡软件包
多面动平衡首先分析基准(原始)振动, 然后轮流在每个面加上试重,进行测试分析。 整个分析流程,用户可以在软件提示下自行完成。获取测量数据
后就可以解算影响系数。软件的核心内容是最小二乘优化的多面动平衡算法,该算法利用了有偏置选项的奇异值(SVD)分解法。
提供标准轮轴配置的图形表示以方便汽车动平衡应用。
软件内容包括:
多面动平衡
对于四轮驱动汽车提供双Tacho支持
配重分解计算
设定不平衡
动平衡消除
奇异值分解法初解算
最小二乘精解算
同步重采样
数据质量检查
用户定义平滑级别
标准传动装置配置
试验的基本步骤:
1 选择平衡面结构
不同的平衡面结构,动平衡的试验区别较大,为从总体上管理多面动平衡试验过程,使多面动平衡试验条理清楚,易于控制,Dats对平衡面结构进行合理的概括和分类。
Dats的平衡面结构有“1 piece” 、“2 pieces”、“3 pieces” 、“4*4 Driveline”、“AWD DriveLine”和“2 Bearing Driveline”等种类,概括动平衡的各种类型。
每种类别都配有平衡面结构图,图上的标出平衡面的参考位置。动平衡测试时首先要选择动平衡的平衡面结构。
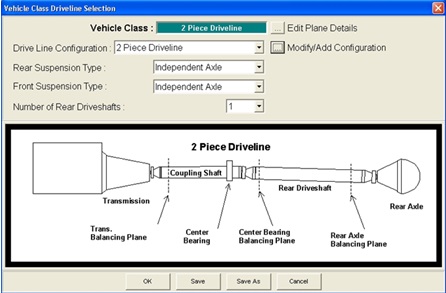
图 1 2-piece平衡面结构图
2 传感器安装和测试通道设置
一般在轴端的壳体上放置加速度传感器, 在互成90º的Z向(一般竖直向上)和Y向各放置一个加速度传感器,构成振动测量面,用以测量轴端振动。振动的测量面可以多达4个。
同时有1到2个转速测量通道,转速信号以脉冲形式输出。每次记录记录所有测试通道数据。
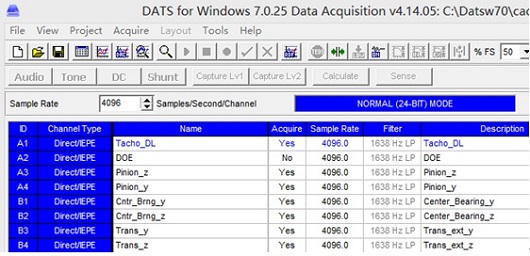
图 2 通道设置例子
3 升速/减速测试
动平衡需要在合适的转速下进行测试,避开主要阶次的高峰和结构的共振频率。在动平衡试验前,要进行升速/减速试验,选择合适的转速。
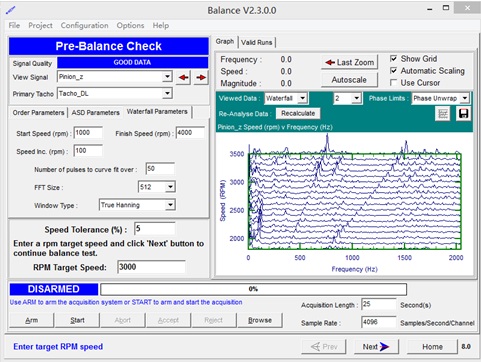
图3 动平衡测试前进行一次升速试验(结果选定3000RPM)
4 初始试验
不加任何试重,在平衡转速下进行试验,测量原始不平衡状态。
可以进行多次试验,Dats计算均值位置。每次试验后试验结果以原始信号、不平衡矢量图和振动值等多种形式显示,使用者可以拒绝任何一次测试,或再增加一次测试,以达到更理想的平均结果。
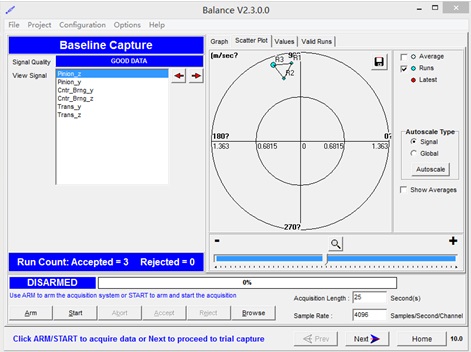
图4初始试验用于确定原始的不平衡状态
5 试重试验
试重试验用以确定影响系数,构成系数矩阵。
在预定的平衡面上添加指定试重,然后在选定的转速下试验,记录数据。每次试验后试验结果以原始信号、不平衡振动矢量图和振动值等多种形式显示,使用者可以废除任何一次测试,或再增加一次测试,已达到更满意的平均结果。
每个平衡面进行一组测试,以后任何一个平衡面加试重前,要去掉上一个平衡面的试重。
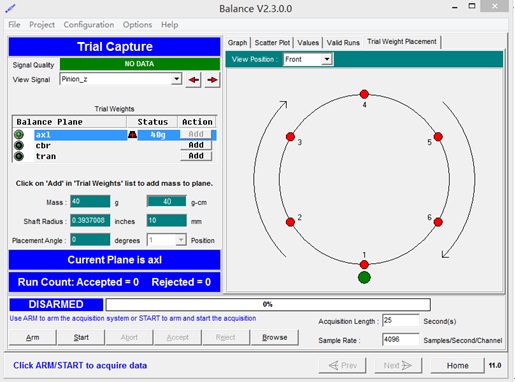
图5a 试重试验 (试重的大小和添加位置)
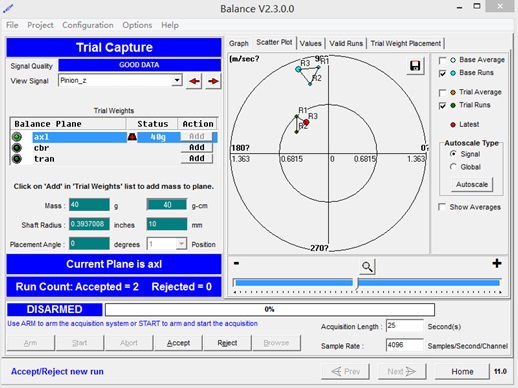
图5b 试重试验 (三次试重试验的结果)
6 计算结果
试重试验结束后,就可以进行动平衡的计算。
Dats有两种动平衡结果,一种是动平衡结果,另外一种是指定不平衡结果,后一种是一种特殊应用。两种结果均采用奇异值分解(SVD)算法。
如下图,计算结果右侧的不平衡矢量图中,原始的不平衡量用小点表示,动平衡的振动结果用同一颜色的大点表示,可以看到大的圆点均相对于小圆点更接近圆心,说明不平衡量变小。左侧上部的栏给出实现平衡的配重的大小和位置。左侧下部的栏给出平衡后振动量的预测值。
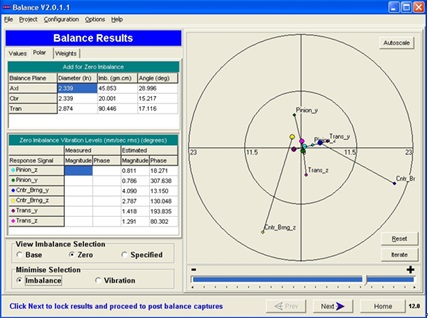
图 6 动平衡的计算结果
7 平衡后测试检查
平衡后测试用于在安装配重后检查动平衡结果。
按计算结果,在指定位置添加配重后,再次在选定转速下测试,记录数据。验证动平衡的结果是否有改进。再此基础上可以再进行一次新的动平衡试验,直到无法改进。动平衡试验次数没有限制。下图右侧是振动矢量图,青色的小点表示初始振动值,红色的圆点表示添加配重后的振动矢量。可以看出实测的振动值变小。说明动平衡配重有效。
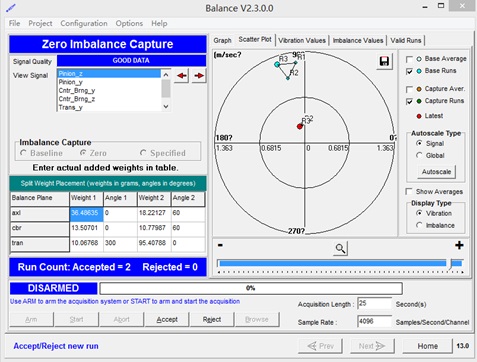
图 7 平衡后测试残余不平衡
|
|